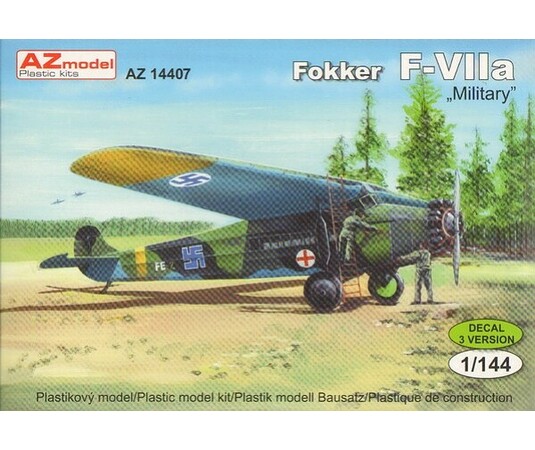
Six-channel miniature receiver Futaba of the transmission system T-FHSS Air-2.4GHz without telemetry with limited range. It is intended for use in drones with a control unit communicating via the S.BUS bus or in indoor aircraft models with S: BUS or conventional (PWM) servos. The R3206SBM provides up to 6 standard PWM channel outputs and 1 S.BUS serial output. The operating states of the receiver are indicated by an LED indicator.
Transmission system
Power supply
3.2-8.4 V (operating voltage) - ie eg 4-6 cells NiMH, 1-2S LiPo, LiFe, Li-ion batteries, BEC power stabilizers in the given voltage range.
Antenna
The receiver is equipped with a simple antenna. The range is limited - about 100 m.
Receiver outputs
The receiver is equipped with three cables for S.BUS output and power supply (+/-, S.BUS signal) and solder pads for connecting the signal wires of PWM outputs for conventional servos 1-6.
Channel outputs (PWM / S.BUS): R3206SBM offers serial S.BUS output and 6 classic PWM outputs.
Telemetry
The R3206SBM does not allow telemetry transmission.
The receiver set contains: receiver R3206SBM, operating instructions.
What Is S.BUS2 / S.BUS
- S.BUS - Futaba serial bus with one-way communication enabling control of servos, controllers, switches, gyroscopes and other compatible RC devices connected to a single output port of the S.BUS receiver.
- S.BUS2 - Futaba serial bus for bidirectional communication enabling (as S.BUS) control of servos, controllers, switches, gyroscopes and other compatible RC devices connected to a single output / input port of the S.BUS2 receiver. In addition, it allows the connection of telemetry sensors and the transmission of data from them via a receiver for display on the transmitter; from some SB The US2 servo can transmit information about the operating current, temperature or angle of the servo output lever to the transmitter.
Unlike conventional RC S.BUS (2) kits, the system uses serial data communication to transmit control signals from the receiver to a servo, gyro or other device. This data contains commands such as "move servo channel 3 to 15 degrees, move servo channel 5 to 30 degrees" for multiple devices. S.BUS (2) devices only execute commands corresponding to their own set channel. For this reason, it is possible to connect several servos to the same signal cable, while setting and controlling them individually as needed. The servo identification code (ID) is used for this. You can find the ID on the sticker on the servo box.
The S.BUS2 servo can be connected to both S.BUS2 and S.BUS ports of the receiver. Its function is given by setting the channel in the servo memory (it is performed using the programming interface of the Futaba transmitter, SBC-1 programmer or CIU-3 USB interface with PC program S-Link - for some servos the channel can be set only with the transmitter).
The S.BUS or S.BUS2 servo connected to the channel output of the classic receiver (PWM) works like a classic servo. Its movement is given by a signal in the channel of the receiver to which it is connected. The settings of the programmable servo functions remain valid.


























































































{kind=link}