
Shopping Cart
There are no more items in your cart




























































{kind=link}
{kind=link}



Express delivery

Large selection of carriers

Satisfaction guarantee
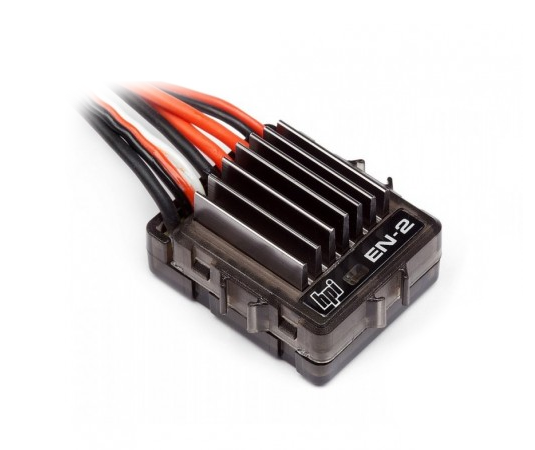
Ultra strong and super fast programmable digital micro servo with metal gears with output shaft mounted on two ball bearings. It is specially designed for 1:12 racing road cars, it was developed in cooperation with the European champion Max Mächler. For easy installation in different types of chassis, the servo is housed in a plastic box with both normal and flat mount feet.
Extended supply voltage 3.7-7.4 V (nominal), operating 3.5-8.4 V.
With the help of the USB programmer/interface for DSP-1 servos and the operating PC program, you can program a whole range of servo parameters:
Dead Band: The width of the dead band indicates the amount of change in the width of the control signal pulses at which the position of the output shaft/servo lever has not yet changed. MKS default setting = 1 µs or 1.1 µs
Lock: Setting the behavior of the servo if it does not receive a control signal - Maintains the position corresponding to the last signal received / The motor is free, the servo does not maintain any position.
Max. Duty (Max. engagement): The degree of engagement of the motor will be limited by this value - it limits the max. output of the servo motor.
Pulse Lower (Min. pulse width): The lower limit of the control pulse width and the corresponding servo deviation size will be limited by this value.
Neutral: Adjusts the width of the control pulses in the neutral/center position of the servo.
Pulse Upper (Max. pulse width): The upper limit of the control pulse width and the corresponding servo deviation size will be limited by this value.
Boost: Engine power when starting from rest. The larger the value, the more force the motor starts.
Left Angle: Max. left servo deflection size.
Right Angle: Max. amount of servo deflection to the left.
Reversion : Reverses the sense of servo deflection.
Allow Uncont (Enable Fail-safe): In case of loss of the control signal, the servo will go to the preset emergency position corresponding to the "Uncontrolled Position" value.
Uncontrolled Pos: If "Allow Uncont" is enabled (Enable Fail-safe), it sets the servo's emergency deflection in case of signal loss.
Uncontrolled Time: The servo will go to the "Uncontrolled Position" emergency deflection after the "Uncontrolled Time" has elapsed in case of signal loss.
| Servo size | Micro |
| Servo type | Digital |
| Programmable | Yes |
| Thrust at 3.7 V [kg•cm] | 3.75 |
| Thrust at 6.0 V [kg•cm] | 6.1 |
| Thrust at 7.4 V [kg•cm] | 7.5 |
| Thrust at 8.2 V [kg•cm] | 8.3 |
| Speed at 3.7 V [s/60°] | 0.157 |
| Speed at 6.0 V [s/60°] | 0.097 |
| Speed at 7.4 V [s/60°] | 0.079 |
| Speed at 8.2 V [s/60°] | 0.071 |
| Control pulse width in neutral [µs] | 1520 |
| Repetition frequency [Hz] | 333 |
| Deadband [ms] | 0.001 |
| Servo transmissions | Metal |
| Ball bearings | 2× |
| High voltage | Yes |
| Power supply [V] | 3.7 - 8.4 |
| Length [mm] | 27 |
| Width [mm] | 12.1 |
| Height [mm] | 27.7 |
| Weight [g] | 18.1 |
| Intended for | Road cars |

